连杆式门座起重机臂架及平衡重系统优化设计

四连杆式门座起重机臂架及平衡重系统
优化设计
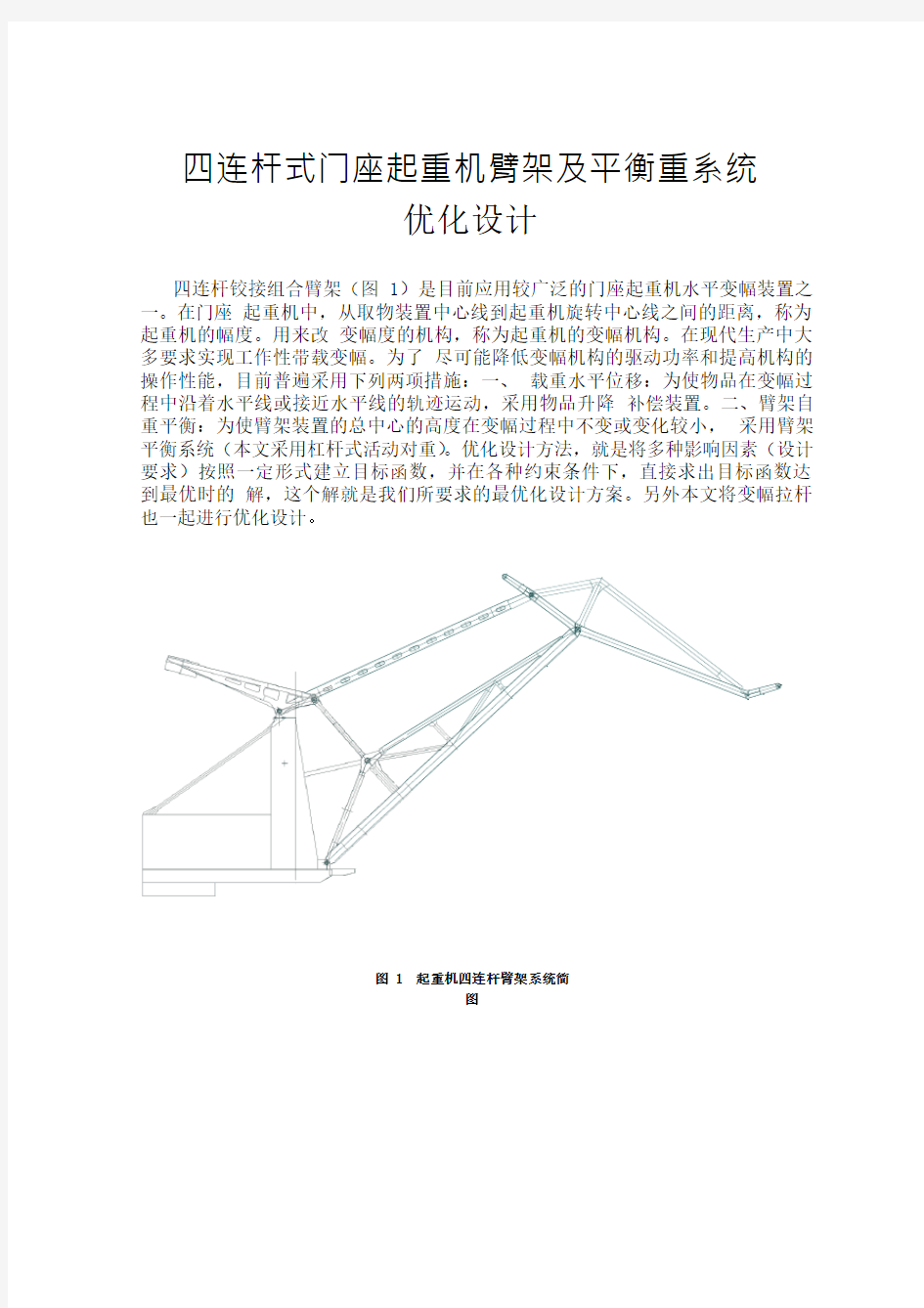
四连杆铰接组合臂架(图 1)是目前应用较广泛的门座起重机水平变幅装置之一。在门座起重机中,从取物装置中心线到起重机旋转中心线之间的距离,称为起重机的幅度。用来改变幅度的机构,称为起重机的变幅机构。在现代生产中大多要求实现工作性带载变幅。为了尽可能降低变幅机构的驱动功率和提高机构的操作性能,目前普遍采用下列两项措施:一、载重水平位移:为使物品在变幅过程中沿着水平线或接近水平线的轨迹运动,采用物品升降补偿装置。二、臂架自重平衡:为使臂架装置的总中心的高度在变幅过程中不变或变化较小,采用臂架平衡系统(本文采用杠杆式活动对重)。优化设计方法,就是将多种影响因素(设计要求)按照一定形式建立目标函数,并在各种约束条件下,直接求出目标函数达到最优时的解,这个解就是我们所要求的最优化设计方案。另外本文将变幅拉杆也一起进行优化设计。
图 1 起重机四连杆臂架系统简
图
下面详细介绍了如何建立优化设计所需的数学模型,基于 MATLAB 的优化设计计算方法
以及实例演示。
1 优化设计的数学模型
优化设计就是根据设计要求提出的多项指标建立目标函数,在满足结构、工艺、载荷及其重量限制等约束条件下,选取设计变量,使目标函数取得最优值。因此,设计变量、目标函数、约束条件是构成一个优化设计问题的三个重要概念。
图 2 所示为四连杆臂架系统,已知最小和最大幅度S min 、S max ,起升高度H(须注意分别减去起重机回转中心、轨面到主臂架下铰点的距离),以及起重量Q 等技术参数。要求设计这个四连杆变幅装置,使变幅过程中由物品引起的臂架变幅阻力矩和臂架自重引起的相对于臂架下铰点的前后力矩差尽量地小,变幅轨迹的最大高度差尽量地小,臂架势能变化也尽量地小,而四连杆装置和平衡配重的重量轻,人字架顶点和变幅装置的位置要求落在规定的范围内等要求。
图 2 四连杆臂架系统计算简
图
图中需要优化的变量符号意义如下:
m
1
——象鼻梁中间铰点偏离象鼻梁中心线距离; m
2
——象鼻梁前段长度
m
3
——象鼻梁后段长度; m
4
——主臂架长度
m
5
——大拉杆下铰点到主臂架下铰点的水平距离
m
6
——大拉杆下铰点到主臂架下铰点的垂直距离; m
7
——大拉杆长度
m
8
——OG; m
9
——E G; m
10
——DP; m
11
——GP; m
12
——DQ; m
13
——PQ
m
14
——变幅驱动机构铰点到主臂架下铰点水平距离
m
15
——变幅驱动机构铰点到主臂架下铰点垂直距离
T
T T
T
m
2
2 2
m 2
2
2 2
1.1 设计变量:
这个四连杆变幅装置的设计可以归结为 16 个设计变量:
m 1 ~ m 15 , G Q (其中G Q 为平衡配重重量) ,即
x m 1 , m 2 , m 3 ,LL , m 15 , G Q x (1) , x ( 2) , x (3) ,LL , x (15) ,
x (16)
其中有些设计变量出于结构上的考虑,有一定的数值限制。如象鼻梁与臂架的
铰接点 E
相对于其两端铰接点连线的下垂距离 m 1 ,一般是预先给定的,或为零,或有一定距离。还有 人字架顶部铰接点 D 和变幅装置位置点 R ,也是或为定点,或规定其变动范围。从势能平衡 的观点来看,平衡重杠杆后段 m 12 的尺寸越长,则变幅过程中平衡升降的距离就越大,平衡重
的重量就可以取得越小。但 m 12 的长度,通常受到起重机尾部半径的限制,因此一般把 m 12 取 为常量。至于其它变量在数值上则都没有明确的范围,但从几何关系上应在给定的幅度范围
内保证四连杆的构成。所以设计变量修改为:
x m 2 , m 3 , m 4 , m 7 , m 8 , m 9 , m 10 , m 11 , m 13 , G Q
x (1) , x ( 2) , x (3) ,LL , x (10)
1.2 目标函数
(本文取 m 1 , m 5 , m 6 , m 12 , m 14 , m 15为定值 )
为建立综合指标的四连杆臂架系统优化设计目标函数的表达式,先确定象鼻梁头部 C 点 的轨迹等表达式,然后确定变幅阻力矩、重量尺寸指标、杆件自重力矩、势能及平衡重等关 系式。
1.2.1 轨迹表达式
由几何关系得:
m 4 c os a 2 min
S max
m 2 c os a 3
min
(1)
m 4 sin a 2 min H
m 2 sin a 3
min
(2)
将(1)式平方加(2)式平方得: 4
S
max
H
2m 4 S max cos a 2 min
2m 4 H sin a 2 min 2
1
2
3 2
2 令: m 4
S max
H
m 2 d 1 ;2m 4
S max
d 2 ;2m 4 H d 3
则有: d 1 d 3 sin a 2 min
d 2 cos a 2 min d
2 1
s i n 2
a 2 min
展开并整理得: (d 2
d 2
) sin 2
a 2 min 2d 1 d 3
sin a 2 min (d 2 d 2
) 0
解此一元二次方程可得最大幅度时主臂架摆角
1 1 n
3 d 2 2
2 2 d d ) 2
2
2
2
1
4
m 2 2
m m 2
1
4 1
d 6 a
2 min
arcsin (
d 1 d 3 d 2 d 2 (d 3 d 2 3
d
2
2
)(d 2
d 2 ) )
同理可求得最小幅度时主臂架摆角
d d
d 2
d 2
(d 2
d 2 )(d 2
d 2
)
d 7 a 2 max
arcsin( 4
3 4
3
3
5
4 5
2 2
3 5
式中: m 4
S min
H
m 2 d 4 ;2m 4 S min d 5
在主臂架摆角形成内( d 6 a 2 d 7 ),把摆角分成 N 等分,得到(N+1)个幅度位置,每个
幅度位置主臂架摆角 a 2i 为
a 2i d
6
(
i
1) a 2 ; i
1,2,LL N 1
d d 式中:
a 7
6 2
N
以 a 2i 为自变量,求出下列各量(以下省略 i ,即 a 2i 写成a 2 )。
m a arccos 1
m arccos
1
; a
m 2
arccos 4
8 m 9
a 5
a 2
m 2 m a r cta n 6 m 5
m 3
a 4 ; n 1
2m 4 m 8
2 2
5 6
2 2 2
n 2 m 4
2
2m n cos(a
4
a 5
); a 6
m arccos 3
n 2 m 7
2m 3 n 2
m 8 a 7
arcsin( m 9 sin a 4 ); a 8
n
arcsin[ 1 n 2 sin(a 4 a 5 )] a 7 ; a 9
a 2
2a 10 2 a 1 a 6 a 7 a 8 a 9 ;
a 3
a 10 ; x C
2
m 4 c os a 2 m 2 sin a 10y C m 4
sin a 2
m 2 c os a 10 ; x O 0; y O 0; x D m 5 ; y D
m 6 ; x E m 4 c os a 2
y E m 4 sin 2 ; x F
m 4 c os a 2 m 3
sin(
a 6 a 7 a 8 a 9 )
y F m 4 sin 2 m 3 cos(
a 6 a 7 a 8 a 9 ); x G
m 8 cos(a 2 a 4 )
13 n 10 m ; n m 12 m
12
n 2
2 m 6 m R R n 9 8
y m
sin(a
a );
n
m
2
n
2
2m n
c os a ; a a r c s i n( m 8
sin a )G
8 2 4 3
8
1
2 2 2
8 1 5 11 5
3
a 12
a r cc os( m 10
n 3 2m 10 n 3 m 11
); x p
m 5 m 10
sin
(
a 11
a 12
arctan
m 5 )
m 6
y p m 6
m 10 cos
(
a 11 a 12
m arctan 5 );
a
m
2
arccos( 10
m 12
m 13
)
a
2 a
a
m 6
m
a arctan 5 ; x m
m sin a 2m 10 m 12
; y m m
c os a 14
11
12
13
Q
5
12 6
14 Q 6 12 14
2
2 2
x R
m 14
; y R
m 15
; a 16
m a r c s i n(
3
s i n a m 7
);
a 17
n
arccos( 2
n 3 m 9
) 2n 2 n 3
a 15
a 4 a 5
a 11
a 16 a 17
; n 4
sin(a 11
a 16 a 17 )
1 4sin
a 15
x T (m 4
n 4 ) c os
a 2 ; y T
(m 4 n 4 ) sin a 2
;
n 5
( x G
x ) 2
( y G
y )
2
n
m
2
m
2
2m m
c os a ;
a
m a arcsin( 3
sin a )
6
2 3
2 3
1
18
3
1
6
n 7 n 4
c os
a 2
m 2 m 3
sin a 2
;
n 8
m 5 (m 4
n 4 ) c os a 2
m 7 cos(a 2
a 15 )
a 19
y arctan G
x G
y R ; n x R
sin ( sin a 7 a 9
2
m 9 a 19 ) c os a 19s i n( a 7 a 9 a 19 )n 10
2 9
11
m 12 sin a 14
sin( 2
a 9 a 19 )
n 12
m 10
sin[a 1
2
a r c s i n( m
10 sin
a )] 11
2
2 2
n 13
m
m sin[arcsin( 10
sin a ) 11
n
arccos 3
m 8 n 1
] 2n 3 m 8
式中:n 1 — —大拉杆下铰点到主臂架下铰点的距离;n 2 — —DE ;n 3 — —DG
n 4 ——ET;n
5
——变幅拉杆长度;n
6
——象鼻梁中心线距离
n 7 ——象鼻梁重心到瞬心T的水平距离;n
8
——F点到瞬心T的水平距离
n 9 ——点G到瞬心U的水平距离;n
10
——EU;n
11
——DQ的水平距离
n
12 ——D点到GP的垂直距离;n
13
——点O到GP的垂直距离
(以上距离单位均为m)a
1 ——象鼻梁前后段的夹角;a
2
——主臂架的摆角
a 3 ——象鼻梁前段与水平线夹角;a
4
—
—E OG;a
5
——D OG
a
6
——D EF;a
7
——G EO;a
8
——D EG;a
9
——主臂架与垂直线夹角
a 10 — —象鼻梁前段与垂直线夹角;a 11 — —
GDO ;a 12 — — G DP
a 13
— —
P DQ ;a 14 — —D Q 与垂直线夹角(可锐可钝)
a 15 — —臂架与大拉杆的夹角;a 16 — —
E DT ;a 17 — — EDG
a 18 — —象鼻梁中心线与水平线的夹角(钝角)
a 19 — —变幅拉杆与水平线夹角;
b — —大拉杆与水平线夹角(钝角)
1.2.2 变幅阻力矩表达式 臂架的变幅阻力矩可以利用已经算得的吊钩移动轨迹并根据功能
原理计算。设臂架从位置 I 摆动到位置 II 的行程角为
a 2 ,吊钩轨迹的高度变化为 y C
,为了克服物品重量 Q 升高
y C 所需的功,在臂架上须作用有力矩 M 变 ,且
M 变 * 2 Q * y C
由此得
y C
M 变 Q
2
当
a 2
0 时, M 变 Q y C 2
即为精确值。因此当臂架摆角行程等分得足够小时,每相
邻两个幅度位置的钓钩高度差值为单位重量物品所引起的在该微量摆角行程上的臂架力矩。 1.2.3 重量尺寸指标 只考虑吊钩轨迹的高度差和臂架的变幅阻力矩还是片面的,因为从理
论上讲,只要把四
连杆尺寸尽量设计得长,从很长的轨迹曲线中相对地截选一小段作为工作轨迹就行。所以以 往对已经满足上述两项指标的一系列四连杆尺寸组合,还得用简图形式从外观上对尺寸和比
例加以评定,为此应将重量尺寸也列为优化指标进行定量考虑。于是重量尺寸指标表示为:
W 重
1
(m 2
m 3 )
2 m
4
3 m
7
4
(m 10
m 11
m 12
m 13 )
5 n
5 max
(当S max 时n 5 值)
式
中
: 1
, 2
, 3
,
4, 5为各杆件单位长度重量
例如,大连重工·起重集团有限公司 45T 门座起重机的象鼻梁长 18.07m ,重
13908kg ,
单位长度重量约 769.6735kg/m ;臂架长 25.8m ,重 27203kg ,单位重量约 1054.3798kg/m ;大 拉杆长 21m ,重 5440kg ,单位重量约 259.0476kg/m ;平衡系统各杆件总长 23.6326m ,总重
13281kg ,单位重量约 561.9779kg/m ;变幅拉杆长 7.39m ,重 2690kg ,单位重量约 364.0054kg/m , 即此臂架系统总重
W 重
769.6735 *18.07
门座式起重机
门座式起重机 一.何为门座式起重机 门座式起重机是以其门形机座而得名的。这种起重机多用于造船厂、码头装卸等场所。在门形机座上装有起重机的回转部分,门形机座实际上是起重机的承重部分。门形机座的下面装有运行机构,可在地面设置的轨道上行走。回转部分上装有臂架和起升、回转、变幅机构。四个机构协同工作,可完成设备或船体分段的安装,或者进行货物的装卸作业 二.门座式起重机的结构 门座式起重机的构造一般分为两大部分,即上旋转部分和下运行部分。 上旋转部分包括:臂架系统、人字架、旋转平台和司机室、机器房。在机器房内安装有起升机构、变幅机构和旋转机构。下运行部分包括:门座和运行结构。 三.门座式起重机四大机构 (1).起升机构 起升机构是起重机提取货物作升降运动的机构,一般是依靠改变电动机的旋转方向来改变取物装置是升、降运动。起升机构由驱动装置、钢丝绳缠绕系统和取物装置组成。(门座式起重机的取物装置一般是吊钩或抓斗) (2).变幅机构 门座式起重机利用变幅机构来改变货物的径向货物以完成
装卸任务。臂架带载进行变幅的称为工作性变幅机构,臂架不带载进行变幅的称为非工作性变幅机构。为提高生产效率,门座式起重机广泛采用工作性变幅机构。 (3).旋转机构 门座式起重机的旋转机构是完成吊物沿圆弧作水平移动的机构。其与起升和变幅机构配合,可将起吊货物移送到变幅范围内的任意位置。旋转机构是由旋转支撑装置及促使转动部分旋转的驱动装置两部分组成的。 (4).运行机构 门座式起重机运行机构是由运行支撑装置、运行驱动装置和安全装置三部分组成。支撑装置包括均横梁、车轮、锁轴;驱动装置包括电动机、制动器和减速机。运行机构的安全装置包括夹轨器、缓冲器以及限位开关、扫轨板等 四.门座式起重机安全操作规程 一、起重机司机安全守责 1、司机必须经过体格检查,身体健康并无妨碍门座起重机操作的疾病及生理缺陷。 2、司机必须进行一定时期的特种设备安全教育和培训,经考试合格取得“国家统一格式的特种作业人员证书”。 3、司机作业前带好随车工具和穿好绝缘鞋,以利安全操作。 4、严禁驾驶员酒后操作起重机。 5、严格遵守“起重机十不吊”的规定
门座起重机技术规格书
门座起重机技术规格书 1、供货范围 重庆港主城港区果园作业区二期工程25t-30m、40t-30m门座起重机各一台的设计、制造、部装成套、总装、运输、吊装、采保、调试、试验(含试重)、试车、验收等(含取得重庆市特种设备安全检测合格证)交钥匙及售后服务全过程。起重机除本机及其内部设置外,每台还包括如下范围: 1.1额定起重量为25t、40t的吊钩各一套。 1.2连接起重机与码头高压箱之间的高压圆形供电电缆壹根/台(有效行走距离按左、右各130米)。 1.3高压供电箱及其固定装置壹套/台。 1.4随机工具、随机备件等壹套/台。 1.5防风锚固装置壹套/台。 1.6现场安装、调试用润滑脂、齿轮油及液压油适量 1.7技术培训和现场服务。 1.8使用说明书的中文电子文档壹套/台,开工前为甲方提供设计方案审查图两套/台和经审核后的施工图纸、资料两套/台,整套竣工图纸(含维修及保养用零件图)及其相关中文资料三套/台,竣工图纸的电子文档壹套/台,包括整机设备配置清单(产品名称、型号规格、数量、生产厂家、联系电话),中文版的使用说明书和维修操作手册,电气控制部分的PLC的中文用户手册、编程手册和程序清单、应用程序软件、梯形图、原理图及其端子板图(含相应内容的电子文档壹套/台),机电设备明细表等。变频器的中文用户手册、编程手册和参数设定值清单,硬件随机资料、驱动软件、系统安装手册(正版)、系统操作手册、系统软件组态手册、系统硬件配置图以及相关软件版本等,还需要提供上述资料的光盘壹套/台,还应提供电高压电缆使用寿命的时间、判断及监测方法。 2、起重机概述: 2.1 本次招标25t-30m、40t-30m门座起重机均为单臂架平衡滑轮组补偿刚性变幅、偏心门座起重机。主要由起升机构、变幅机构、回转机构、行走机构、臂架系统、臂架平衡系统、人字架、转台、机器房、司机室、门架总成、梯子栏杆系
2TL立柱式悬臂起重机的设计与分析
2T 立柱式旋臂起重机的设计 摘要:起重机是工程实际中广泛应用的特种设备。而旋臂起重机是近年发展起来的中小型起重装备,安全可靠,具备高效、节能、省时省力、灵活和结构独特等特点.根据旋臂起重机的整体结构特点和规范规定,了解起重机的发展现状、分析起重机的工作原理、系统组成、所要求实现的功能和相应的结构上必不可少的。该设计主要针对起升机构选择相应的零部件及技术参数,使其既能很好的实现起重机的运行还不互相干涉且配合良好,也对回转机构做了详细的分析介绍。传统设计的定柱式旋臂起重机,存在着结构笨重和刚度不足的缺陷,随着市场竞争激烈,对产品提出了更高的要求,采用现代设计对传统设计和计算方法技术提升,已迫在眉睫。 关键词:起重机;起升机构;回转机构
The Design Of 2-Ton Column Jib Crane Abstract: Crane is widely applied in engineering, Slewing crane is small and medium lifting equipment which developed in recnt years,the characteristics of which are safe and reliable、 with high efficiency、 energy saving、time-saving、flexible 、unique structure,etc.According to the feature of completed structure for slewing jib crane and the rule of design.Understand the development of the crane’status、analyse its operation principle、system configuration、the function and relative structure that the crane required is indispensable.thus this paper put its emphasis on the design of main hoisting mechanism,choosing the approprite spare parts and technical parameters for it in order to be good for crane operation and non-interference.the slewing mechanism analysis is introduced in detail too.the structure of crane designed with tradition method is overdesigned in strength and not enough in stiffness,and with firce competition in the market a higher requirement for product has been brought forward.So using modern design technology to upgrade traditional design and calculation method is extremely urgent. Keywords:crane;hoisting mechanism;Slewing mechanism
门座起重机钢结构组成部分介绍
门座起重机钢结构组成部分介绍 桥架通过两侧支腿支承在地面轨道或地基上的臂架型起重机。具有沿地面轨道运行,下方可通过铁路车辆或其他地面车辆。可转动的起重装置装在门形座架上的一种臂架型起重机。门形座架的4条腿构成4个“门洞”,可供铁路车辆和其他车辆通过。门座起重机大多沿地面或建筑物上的起重机轨道运行,进行起重装卸作业。门座呈“”字形的起重机称半门座起重机,其运行轨道的一侧设在地面上,另一侧设在高于地面的建筑物上。 门座式起重机、门座起重机的钢结构由交叉门式架、转柱、桁架式人字架与刚性拉杆组合臂架等构件组成。其中,门架、人字架、转柱和臂架是主要受力构件。 人字架:在门座起重机中,为了支承臂架,一般设有人字架。变幅机构的推杆、组合臂架的拉杆及其对重杠杆等都与人字架相连。人字架支承在旋转平台上。人字架的结构型式与起重机的基本参数、所采用的臂架及变幅机构的型式有关。 门架:门架结构支撑着上部旋转部分的全部自重和所有外载荷。因此,门架结构对整个起重机的稳定性和减轻自重有着重要意义。门架结构质量约为整个起重机质量的20%~30%。为保证起重机正常平稳运转,门架必须有足够的强度,尤其要有较大的刚度。门架结构型式,可分为转柱门式架、大轴承门架以及定柱门架。根据门架使用钢材的类型,可分为桁架式门架、板梁式门架及箱型门架。 转柱常被做成棱锥形薄壁箱型结构,刚度大自重轻。由于转柱的断面尺寸大,而臂厚小,因此,为了保证局部稳定性何周边的刚性,常在转柱的内臂用横筋和纵筋加强。 旋转平台和转柱:目前广泛使用平台的金属结构有两根纵向主梁和平板组成。根据受力大小,这些梁可做成箱型断面或工字型断面,臂架和人字架都支承在平台上。此外,还有起升旋转平台和转柱相连接。臂架的两个下支承座焊在平台的主梁端部。
壁上起重机和柱式起重机的安装
壁上起重机和柱式悬臂起重机的安装
本标段共有台起重机,起重机的基本安装程序见图-5 图333-5 起重机安装程序图 A为共检项目,B为专检项目,C为自检项目 (1)材料、设备验收: ①按装箱单检查设备及零部件的数量、型号、规格尺寸,应符合设计随 机技资料的要求,并应有出厂合格证明书及必要的出厂试验纪录; ②检查钢丝绳型号、规格长度,不应有腐蚀、变形和断丝等现象; ③对减速机等运转设备外观检查应无异常现象; ④滚筒、滑轮及车轮等部件外观检查应无伤痕、裂纹等缺陷; ⑤传动轴应无变形,轴承应转动灵活,无卡涩现象。 (2)基础验收: ①起重机地面(轨道)基础、吊车梁和安装预埋件等的坐标位置、标高、 跨度和表面的平面度均应符合设计要求; ②壁上起重机和柱式悬臂起重机吊车梁的筋板及焊接缝要符合设计要求; 车挡按设计施工图安装完毕。 (3)壁上起重机和柱式悬臂起重机轨道的安装 ①安装前首先检查轨道的直线度,允差不应超过2mm超标弯曲部位要修整合 格;
②吊装轨道前,应确定轨道的安装基准线;轨道的安装基准线宜为吊车梁的定位 轴线。 ③两平行道轨的接头位置应错开,错开的距离大于600mm且不等于起重机前后车 轮的轮距; ④轨道接头符合下列要求: i)当接头采用对接焊时,焊条应符合钢轨母材的要求,焊接质量应符合电熔焊的有关规定,接头顶面及侧面焊缝处均应打磨平整光滑; ii)当接头采用鱼尾板联接时,轨道接头高低差及侧向错位不应大于1 mm,间隙不应大于2mm; iii)伸缩缝处的间隙应符合设计规定,其允许偏差为±1mm; iv)用垫板支承的方钢轨道,接头处垫板的宽度(沿轨道长度方向)应比其它处增加一倍。 ⑤混凝土吊车梁与轨道之间的混凝土灌浆层或找平层应符合设计规定。 ⑥钢轨下用弹性垫板作垫层时,弹性垫板的规格和材质应符合设计规定。拧紧螺栓前,钢轨应与弹性垫板贴紧;当有间隙时,应在弹性垫板下加垫板垫实,垫板的长度和宽度均应比弹性垫板大10s2 0 mm。 ⑦当在钢吊车梁上铺钢轨时,钢轨底面应与钢吊车梁顶面贴紧;当有间 隙,且其长度超过2 0 0 mm时,应加垫板垫实,垫板长度不应小于10 0 mm,宽度应大于轨道底面10 s20 mm,每组垫板不应超过3层,垫好后应与钢梁焊接固定。 ⑧方钢和工字钢轨道的横向倾斜度不应大于轨道宽度的1 /100。 ⑨轨道经调整符合要求后,应全面复查各螺栓并应无松动现象。 ⑩轨道上的车档宜在吊装起重机前装好,同一跨度两条轨道上的车档与 起重机缓冲器均应接触。 (11)轨道的安装质量标准见表333-4.
随车吊技术参数和配置
6吨随车吊价格-8吨随车吊价格东风底盘飞涛随车吊吊机由湖南飞涛专用汽车制造有限公司提供(有整车公告和燃油公告,可供提整车合格证,能办营运证) 6吨随车吊价格-8吨随车吊价格东风底盘飞涛随车吊吊机-30多年专业研发制造,军工品质。飞涛牌伸缩式系列随车起重运输车,是我公司独家引进日本多田野株式会社伸缩臂式随车起重机产品设计、制造等面的专有技术(合同号:T/92MMG—161(63)001JP)和意大利PM 折臂技术,在全面消化吸收国外技术的基础上,结合我公司30多年设计制造随车起重机所积累的经验,向用户提供的新一代具有国际先进水平的随车起重运输汽车新产品: ●经济实用,省力更省钱: ——独家采用轻量化设计,提高车辆更大的承载能力,自身更省油且提高运输能力,年度投资回收率更高(每行1000KM可省100-200元) ——采用液压绞车技术,效率更高(3-10%),维修更方便,完成同样的工作更经济——独有25%安全超载能力设计,让吊装更安全,工作范畴更大 ●领先技术研发设计、先进工艺打造: ——引进德国生产的数控等离子火焰切割机,自动焊接生产线,参数化电脑设计中心等一批国际先进设备 ——企业拥有国内一流的随车吊生产团队,30年的随车吊生产经验 ——多种附加功能配置个性化定制,满足不同客户的工作需求 ——吊臂五边形或六边形设计,承载能力更强。 ●关键进口部件应用,更持久耐用: ——采用全套进口液压油封件,进口多路阀,专业持久耐用,质量更可靠,使用寿命更长——采用高强度钢板HG80-HG60武钢制造,吊机重量更轻,起重量更大 配装1: 东风单桥EQ5120底盘,6档变速箱,车厢长5.3/6.14米,载重4.7吨,大梁280mm(随车吊专用),轮胎规格9.00-20,发动机玉柴160马力,带中冷增压,前桥3.6吨,后桥9吨。整车外形尺寸:8500mm/9000mm×2490mm×3550mm 配装2: 东风天锦DFL1120B底盘,6档变速箱,车厢长5.3/5.85米,载重4.86吨,大梁250mm(随车吊专用),轮胎规格9.00-20,发动机康明斯180马力,带中冷增压,前桥4.5吨,后桥9吨。整车外形尺寸:8600mm/9000mm×2500mm×3550mm 配装3: 东风单桥145底盘,6档变速箱,车厢长5.3/6.1米,载重4.7/6.605吨,大梁280mm(随车吊专用),轮胎规格10.00-20,发动机玉柴180马力/东风康明斯170马力,带中冷增压,前桥3.6吨,后桥9吨。整车外形尺寸:8500mm/9000mm×2490mm×3550mm 配装4: 东风单桥153底盘,陕齿8档变速箱,车厢长5.3/6.1米,载重4.7/6.605吨,大梁300mm(随车吊专用),轮胎规格10.00-20,发动机玉柴180马力/东风康明斯170马力/康明斯190马力,带中冷增压,前桥5吨,后桥10吨。整车外形尺寸:8500mm/9000mm×2490mm×3550mm 配装5: 东风前4后4随车吊底盘,陕齿8档变速箱,车厢长7.7/8.5米,载重11.905吨,大梁300mm (随车吊专用),轮胎规格10.00-20,发动机玉柴220马力/玉柴240马力/东风康明斯210马力,带中冷增压,前桥5吨,后桥10吨。整车外形尺寸:11280mm/11900mm×2490mm×3800mm 配装6:
四连杆式门座起重机工作机构设计
题目介绍、要求以及数据 设计题目: 四连杆式门座起重机工作机构设计 一、设计题目简介 四连杆门座起重机是通用式门座起重机,广泛应用于港口装卸、修造船厂、钢铁公司,主要由钢结构、起升机构、变幅机构、回转机构、大车运行机构、吊具装置(抓斗、简易集装箱吊具、吊钩)、电气设备及其它必要的安全和辅助设备组成。通过四连 杆控制在吊臂前后运动的时候)起吊节点保持水平高度不变。 二、 设计数据与要求 题号 起重量t 工作幅度(米) 起升高度(米) 工作速度m/min 装机容量KW L2 L1 H1 H2 起升 变幅 回转 运行 C 10 25 8 15 9 50 50 1.5 25 330 三、 设计任务 1、依据设计参数绘出机构运动简图,并进行运动分析,确定实现起吊点轨迹的机构类型 2、依据提供的设计数据对四连杆起吊机构进行尺度综合,确定满足使用要求的构件尺寸和运动副位置; 3、用软件(VB 、MATLAB 、ADAMS 或SOLIDWORKS 等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。 4、 编写说明书,其中应包括设计思路、计算及运动模型建立过程以及效果分析等。 5、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。
第一章、概述 第一节、四连杆门座式起重机的参数 起重机的主要参数有: 起重量、幅度、起升高度、各机构的工作速度、工作级别及生产率。此外, 轨距、基距、外形尺寸、最大轮压、自重等也是重要参数。 1.1起重量 起重量是指起重机安全工作时所允许的最大起吊货物的质量,单位为“kg” 或“t”,用“Q”表示。起重量不包括吊钩、吊环之类吊具的质量,但包括抓斗、 料斗、料罐、工属具之类吊具的质量。起重量较大的称为主起升机构或主钩,起 重量较小的称为副起升机构或副钩。副钩的起升速度较快,可以提高轻货的吊运 效率。主、副钩的起重量用一个分数来表示。例如15/3t,表示主钩的起重量为 15t,副钩的起重量为3t。16t门座起重机的标注:16/10-9~22/30。意为在9~ 22m幅度内起重量为16t,在9~30m幅度内起重量为10t。 1.2幅度 幅度是指起重机旋转轴线至取物装置中心线之间的距离,用“R”表示,单位是“m”。当起重臂外伸处于最远极限位置时,从起重机旋转中心到取物装置中心线中间的距离称为最大幅度(Rmax);当起重臂收回处于最近极限位置时,从起重机旋转中心到取物装置中心线之间的距离称为最小幅度(Rmin)。起重机的幅度不是一个孤立的参数,与起重量密切相关。 1.3起升高度 起升高度是指起重机取物装置上下极限位置之间的距离,单位是“m”,用“H”表示。下极限位置通常取为工作场地的场面或运行轨道顶面,吊钩以钩口中心为准, 抓斗以最低点为准。轨面上和轨面下的起升高度,分别用H 上和H 下 表示,H 上 十H 下 =H。在确定起重机的起升高度时,要考虑到下列因素:起吊物品的最大高度、需要越过障碍的高度、吊具所占的高度等。对于港口门座起重机还要考虑船舶在低潮、高潮、空载、满载时的不同情况。
悬臂起重机设计
三维悬臂起重机的研发设计 总结报告 一.设计背景 在矿安全为天,安全就是一切的理念引领下,随着矿单体液压支柱检修数量的增加及我厂员工年龄的偏大,针对我厂支护车间检修单体液压支柱主要靠人工把单体液压支柱抬到检修试验台上,这种方式不仅有很大的安全隐患,而且已不能满足现在矿上的检修生产任务,因此我们根据单体液压支柱的重量及体积,在检修工房内,自主设计、制作了悬臂起重机。 二.设计理念 悬臂起重机是近年发展起来的中小型起重装备,结构独特,安全可靠,具备高效、节能、省时省力、灵活等特点,三维空间内随意操作,在小范围、设备密集性场合,比其它常规性吊运设备更显示其优越性。 起重机旋臂为工字钢结构,具有自重轻、行走轻快灵活、经济耐用等特点,因其结构简单、小巧轻便,所以特别适用于较为狭窄的空间运行。 三.结构设计 针对我厂支护车间单体液压支柱修理班组所在位置,首先进行现场考察,是否适合安装悬臂起重机。由于悬臂起重机工作强度为轻型,屋内没有立柱,因此我们选择墙壁起到固定和支撑作用。 起重机主要由回转臂及电葫芦组成,回转臂作水平旋转,电动葫芦实现设备的起吊和运行。 对于悬臂起重机不同的受力部位我们选择了不同的材料制作: 1、选择δ20mm的A3钢作为支撑板;
2、利用4条M24螺栓将支撑板固定在墙壁适当位置,起到定位和支撑的作用; 3、11#工字钢作为悬臂,其上安装电葫芦,主要承受起重件的重量; 4、Φ65mm的45#优质碳素钢作为销轴,起重机主要绕其旋转,实现不同角度工件的起吊; 5、δ30mm的高锰钢作为耳板,从使用的安全性考虑,主要受拉力的上耳板选择双耳,从而确保安全性和可靠性,下耳板为压应力选择单耳即可; 6、为了进一步确保其安全性,采用63mm×6mm角铁设计了拉杆,增加了悬臂起重机的稳定性和提高了悬臂末端的承重力,并且拉杆与悬臂之间用管作为撑筋,管的抗弯强度最大,而且自重轻,起到稳定起重机主要支撑结构形状不变和减轻悬臂的自重。 7、安装HGS-B800型电葫芦,起重量为800kg,起升高度为3m。 经过现场多次试验,悬臂起重机的使用,完全满足我们检修单体液压支柱,具体设计结构请看附图。 四、解决问题 1、悬臂起重机的设计、制作和使用,使得我厂单体液压支柱检修、试验告别了人工搬运的时代,迎来了全新的机械化时代。以前需要两个人把单体液压支柱抬到试验台上,才能开始检修、试验任务,每次都累的工人师傅汗流浃背,检修完成后还得把其抬下试验台,这样既耗时又费力,而且需要较强的协同配合能力,在较为狭窄的工作空间,稍有疏忽就可能造成安全隐患。 2、使用我们自主研发的悬臂起重机,缩短了检修时间,检修效率得到了明显提高,而且不需耗费大量人力,保证生产任务的同时安全性大大增加。
随车吊以及随车起重机培训内容
程力随车吊以及起重机培训内容 一:常识 1随车起重机的吊臂形式? 随车起重机分直臂式随车起重机和折叠式随车起重机两种。直臂式随车起重机是通过吊臂的伸缩油缸把吊臂伸出或缩回。通过卷扬机构由钢丝绳提起货物。折臂式随车起重机主要是通过油缸的变化直接提起货物,折臂式随车起重机的动作快,工作效率高。直臂式的随车起重机适用范围更广,更平稳、更安全。目前我国有90%是用直臂式的随车起重机。我们对两种起重机的代号分别为“S”和“Z”.表示。比如SQ6.3SA2表示6.3吨三节直臂式随车起重机,有两节伸缩 臂。.SQ6.3ZA3表示6.3吨四节折臂式随车起重机,有三节伸缩臂。 2:随车起重机的回转形式? 目前我国随车起重机主要是齿条回转和回转支承两种回转结构形式。 齿条回转是指起重机的油缸带动齿条运动使立柱旋转。齿条是直线,所以旋转到一定的位置后就不能再往前,因此齿条回转是有范围的。比如:回转角度400度,就是当起重机转动360度后,还可以继续往前旋转,但当达到400度时,就转不了了。要回过来旋转。 回转支承旋转是回转箱齿轮带动回转支承齿轮的全回转,是没有方向的任意旋转。回转支承是圆的,所以没有角度的限制。哪个方向都可以旋转。我们一般叫做正负360度旋转。是比较实用的回转结构形式。 3:随车起重机的后支腿形式有几种? 后支腿分固定后支腿和活动后支腿两种。固定后支腿是油缸直接往下伸的。跨距比较短。活动后支腿是水平方向可以伸出来,然后再往下伸。跨距比较大,比较平稳。 4:小霸王,多利卡,两轴车,小三轴车,后双桥,前四后八分别适合装什么吊机? 小霸王:适合2.5吨吊机(蓝牌) 多利卡:适合2.5-4吨的吊机 两轴车:145,153单桥适合4吨,5吨,6.3吨,7吨,可以选择8吨 小三轴车:适合6-12吨吊机 后双桥:适合8-12吨吊机 前四后八:适合10-20吨吊机 5:三包服务的前提是什么?期限是什么?
机械原理四连杆门座式起重机
机械原理2013—2014学年 大作业 设计题目:四连杆式门座起重机 工作机构设计 姓名:李瑞 学号: 20116447 专业班级: 11级铁道车辆一班 指导教师:何俊 2013/11/10
题目介绍、要求以及数据 设计题目:四连杆式门座起重机工作机构设计 一、设计题目简介 四连杆门座起重机 是通用式门座起重机, 广泛应用于港口装卸、 修造船厂、钢铁公司,主 要由钢结构、起升机构、 变幅机构、回转机构、 大车运行机构、吊具装 置(抓斗、简易集装箱 吊具、吊钩)、电气设备 及其它必要的安全和辅助设备组成。通过四连杆控制在吊臂前后运动的时候)起吊节点保持水平高度不变。 二、设计数据与要求 题号起重量 t 工作幅度(米)起升高度(米)工作速度m/min 装机容量 KW L2 L1 H1 H2 起升变幅回转运行 C 1 1.5 25 330 三、设计任务 1、依据设计参数绘出机构运动简图,并进行运动分析,确定实现起 吊点轨迹的机构类型 2、依据提供的设计数据对四连杆起吊机构进行尺度综合,确定满足 使用要求的构件尺寸和运动副位置; 3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构 进行运动仿真,并画出输出机构的位移、速度、和加速度线图。 4、编写说明书,其中应包括设计思路、计算及运动模型建立过程 以及效果分析等。 5、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。
第一章、四连杆式门座起重机的介绍 第一节、四连杆式门座起重机的概述 门座起重机是起重机的一种,是随着港口事业发展起来的。第一次在港口上运用门座式起重机是在1890年将幅度不可变的固定式可旋转臂架型起重机横跨在窄型码头上,这是门座起重机的第一次运用。在第二次世界大战之后港用门座起重机迅速发展,在发展的过程中门座起重机还逐渐应用到作业条件与港口相近的船台和水电站等工作地点。 图1-1 M10-30门座起重机总图 ⒈电缆卷筒;2.转柱;3.门座;4.转台;5.机器房;6.起重量限制器;7.变幅机构;8.臂架系统;9.防转装置;10.吊钩装置;11.抓斗稳定器;12.抓斗;13.司机室;14.回转机构;15.起升机构;16.运行机构 1、机构的运动简图为:
双梁门式起重机设计计算书(—)150吨20米
第一章设计出始参数 第一节基本参数: 起重量PQ=150.000 ( t ) 跨度S = 20.000 (m ) 左有效悬臂长ZS1=0.000 (m) 左悬臂总长ZS2=1.500 (m) 右有效悬臂长YS1=1.500 (m ) 右悬臂总长YS2=0.770 (m) 起升高度H0=20.000 (m) 结构工作级别ABJ=5级 主起升工作级别ABZ=0级 副起升工作级别ABF=5级 小车运行工作级别ABX=5级 大车运行工作级别ABD=5级 主起升速度VZQ=3.4000 (m/min) 副起升速度VFQ=3.4000 (m/min) 小车运行速度VXY=2.4000 (m/min) 大车运行速度VDY=2.4000 (m/min) 第二节选用设计参数 起升动力系数02=1.20 运动冲击系数04=1.10 钢材比重R=7.85 t/m'3 钢材弹性模量E=2.1*10'5MPa 钢丝绳弹性模量Eg=0.85*10'5MPa 第三节相关设计参数 大车车轮数(个)AH=8 大车驱动车轮数(个)QN=4 大车车轮直径RM=0.7000(mm) 大车轮距L2=11.000 (m) 连接螺栓直径MD=0.0360 (m) 工作最大风压q1=0/*250*/(N/m'2) 非工作风压q2=0/*600*/(N/m'2) 第四节设计许用值 钢结构材料Q235----B 许用正应力[ σ ] I=156Mpa [ σ ] II=175Mpa 许用剪应力[ ? ]=124Mpa 龙门架许用刚度:
主梁垂直许用静刚度: 跨中(Y)x~1=S/800=30.00mm 悬臂(Y)1=ZS1/700=2.00mm 主梁水平许用静刚度: 跨中(Y)y~1=S/2000=12.00mm 悬臂(Y)1=ZS1/700=2.00mm 龙门架纵向静刚度: 主梁严小车轨道方向(Y)XG=H/800=16.4mm 许用动刚度(f )=1.7H z 连接螺栓材料8.8级螺栓 许用正应力[ σ ] 1s=210.0Mpa 疲劳强度及板屈曲强度依GB3811-83计算许用值选取。 第二章起重小车设计 第一节小车设计参数 小车质量(t) GX=50.000(t) 小车车距(m) B=3.500(m) 轨道至主梁内边(m) L5=0.030(m) 小车轨距( m ) L6=2.500(m) 小车左外伸(m) L7=0.500(m) 小车右外伸(m) L8=0.500(m) 主梁与马鞍间距(m) L11=0(m) 吊钩下探量(m) H6=2.000(m) 小车轨道截面高(m) H7=0.120(m) 小车高H8=1.650(m) 小车顶至马鞍(m) 小车罩沿大车轨道方向 迎风面积(m'2) XDS=12.000(m'2) 小车罩垂直于大车轨道方向 迎风面积(m'2) XXS=12.000(m'2) 钢丝绳金属丝截面积(m'2) DO=6.550700e-004(m'2) 滑轮组钢丝绳分支数半NO=5 小车轨道型号QU70 小车外罩至导电架距离(m)L9=0.97(m) 小车外罩至栏杆距离(m) L10=0.970(m) 法兰至主梁上盖板距离(m)HD=1.800(m) 第二节设计计算 为工厂便于组织生产,提高标准件的通用性,设计中不进行起重小车设计,而采用5t--50t 通用桥式起重机小车。此,起重机小车设计详见5t--50t通用桥式起重机小车计算说明书。
第六节 门座式起重机安全技术
第六章 门座起重机安全技术 第一节 门座起重机的分类 门座起重机是以其门形机座而得名的。这种起重机多用于造船厂、码头装卸等场所。在门形机座上装有起重机的回转部分,门形机座实际上是起重机的承重部分。门形机座的下面装有运行机构,可在地面设置的轨道上行走。在回转部分上装有臂架和起升、回转、变幅机构。四个机构协同工作,可完成设备或船体分段的安装,或者进行货物的装卸作业。 门座起重机通常用由外部电网经软电缆供电,其四大机构一般均采用三相感应电动机分别驱动。 按门座结构形式不同可分为全门座起重机和半门座起重机两种。所谓半门座就是指起重机的一侧支撑在地面轨道上,另一侧则支撑在厂房外侧的承轨梁的轨道上。 按专用场合不同则可分为:港口用门座起重机、造船用门座起重机和水电站用门座起重机三种。另外国家《特种设备目录》中还有带斗门座式起重机,并且把港口台架起重机、液压折臂起重机和固定式起重机也列入门座起重机的范畴(如图6-1)。 图6-1 门座起重机种类 港口门座起重机 造船门座起重机 水电站门座起重机 带斗门座起重机 港口台架式起重机 固定式起重机
第二节 门座起重机的结构和性能 门座起重机的构造一般分为两大部分,即上旋转部分和下运行部分。 上旋转部分包括:臂架系统(如图6-2)、人字架(如图6-3)、旋转平台和司机室、机器房。在机器房内安装有起升机构、变幅机构和旋转机构。下运行部分包括:门座和运行机构。 图6-2 图6-3 一、门座结构及其技术要求 门座结构分为桁架式和钣梁式。由于它承受着全部起重部分的重量及吊重和风载,同时承受着各种运动所产生的惯性力和由此而引起的各种变矩作用,因此要求它具有足够的刚性和强度。 门座的门洞尺寸,依专用场合有所不同,港口用门座的门洞可通过1~3条铁路路轨,因而有一线门座、二线门座和三线门座的称法。其门座轨距分别为6m 、10.5m 、和15m ;船用门座轨距为6m 、10m 和12m ;水电站用门座轨距为7m 、10.5m 和13.5m 。 (1)门座结构形式 ①八杆门座。如图6-4a 所示,它是由顶部圆环结构、中部八根支杆以及下部门座等三部分组成。支杆可由型钢或钢板焊制。门座多为钢板制成的箱形结构。此种门重量轻、结构简单、制造方便。 ②交叉门座。如图6-4b 所示,它是由箱形截面的两片钢架垂直方向交叉组成。顶部是箱形断面的圆环,上面装有圆形轨道及齿轮;中 部有一层或两层水平十字梁,用来拉撑四条立腿;上层十字梁可用来装置转柱下支撑座。其特点是门座构件少,刚性好,制造也较简单,但自重较大。 ③圆筒门座。如图6-4c 所示,圆筒门座是把整个门座的中间部分,用大直径钢筒代替前两种门座的支杆或箱形结构支腿的上半部。顶面上装有大直径滚动轴承和大齿轮。圆筒内装有电梯和爬梯等。这种门座风阻小,自重轻,外形简单,制造安装均较方便。 图6-4
汽车随车起重机设计(有cad图)
摘要 6.3吨随车起重机属于架型起重机,它将起重和运输相结合,不仅节省劳动力,而且极大的减小了工作强度、提高了工作效率。本次毕业设计在6.3吨随车起重机上首次采用了伸缩臂型结构,并对起重机臂进行了优化设计。它具有结构紧凑、易于操作的特点,可广泛用于交通运输、港口、仓库、以及所有中小型工业货物装卸与远距离运输之中。 本文主要内容如下: 起升机构设计起升机构包括液压马达、减速机、棘轮停止器和卷筒。减速机用来降低液压马达驱动速度,卷筒用于绕进或放出钢丝绳。机构工作时,液压马达驱动减速机,减速机的低速轴带动卷筒,将钢丝绳卷上或放出,经过滑轮组系统使载荷实现上升或下降,其升降由马达的旋转方向而定,通过棘轮停止器实现制动。 起重臂设计起重臂采用伸缩式、箱形结构。箱形结构内装有伸缩油缸,臂的每个外节段内装有滑块支座,因此起重机的变幅可通过液压缸实现。为了减轻吊臂自重,充分发挥钢材的作用,吊臂的不同部位采用不同强度的钢材。 回转机构设计回转机构由回转支承装置和回转驱动装置组成。即一对脂润滑的回转支承装置、蜗轮旋杆减速机和液压马达。这种结构自重轻、受力合理、运行平稳,可以使机构在水平面内运输货物。 [关键词]: 随车起重机;起升机构;起重臂;回转机构;回转支承
Abstract 6.3Truck Mounted Crane (abbreviation TMC) belongs to boom-Crane .It combines the advantages .So it can greatly decrease labor intensity, increase working I use flexible boom in TMC for the first time and have a optimization design. This product has features of compact structure, easy operation. It is suitable for wide use in traffic transportantion,dock warehouse and all small-sized industries for goods loading loading and unloading and long distance transportation. Its main content includes the following aspects: The design for winch mechanism The winch mechanism consists of hydraulic motor, reducer, ratchet wheel stop and winch drum.Reducer lowers the speed of hydraulic motor for driving the winch drum to wind or unwind the load hoisting wire rope. When working, the motor drives reducer and bring along winch drum rotation, then the wire rope is wound or unwound ,the load will be lift or lowered through pulley block system. Lifting or lowering of the load will be controlled by the rotation direction of the motor. Ratchet wheel stop is used to stop the motion of the drum, holding the load in the air. The design of boom The boom adopts flexible type and box-shaped structure.Cylinder bodies are fitted on the boom. There are slide supports at outsides of every section of booms. The working range of TMC can outsides of every are fitted on the boom.There are slide supports at outsides of every section of booms. The working range of TMC can be realized by the extension or retraction of cylinder body. It uses different steel products in different positions for decrcasing boom’s weight and fully developing steel products’ function. The design of swing mechanism Swing mechanism contains swing bearing and swing driver, the same is, no-oil lubricated bearings, worm-and-wheel steering gear and gydraulic motor. This structure has the advantages of light weight, reliable force on it and smooth action. It can make the load transported in the horizontal plane. Key words TruckMounted Crane ;winch mechanism;Boom ;swing mechanism;Swing bearing
创新课程设计—纸质悬臂结构
目录 设计任务书 1 设计说明书................................................ 错误!未定义书签。 1.1 设计构思............................................ 错误!未定义书签。 1.1.1 结构造型构思................................... 错误!未定义书签。 1.1.2 结构体系的选择................................. 错误!未定义书签。 1.1.3 结构特色说明 (6) 1.2 模型设计图纸 (7) 1.2.1 结构作品效果图 (7) 1.2.2 结构布置图 (8) 1.2.3 主要构件详图及节点图 (8) 2计算书 (12) 2.1计算简图 (12) 2.2结构计算假定和各个单元物理参数 (12) 2.2.1计算假定 (12) 2.2.2构件截面尺寸 (11) 2.2.3材料力学性质 (13) 2.3静载工况下结构的内力分析 (14) 2.3.1结构强度计算 (14) 2.3.2结构刚度计算 (17) 2.4承载能力验算 (18) 2.4.1强度验算 (18) 2.4.2刚度验算 (19) 2.4.3稳定性验算 (19) 2.5承载能力的估算 (19) 2.5.1稳定条件控制的最大承重G1 (19) 2.5.2强度条件控制的最大承重G2 (19) 2.5.3刚度条件控制的最大承重G3 (20) 2.6破坏形式的估计 (20) 小组分工说明 (20) 附录一结构力学求解器输入源代码 (21) 附录二结构内力输出值 (23) 附录三结构变形输出值 (25)
随车起重机伸缩臂架的优化设计
目录 摘要---------------------------------------------------------------------------------------------1 前言---------------------------------------------------------------------------------------------2 1. 概述------------------------------------------------------------------------------------------6 1.1 随车起重机用途和特点--------------------------------------------------------------6 1.2 型号意义--------------------------------------------------------------------------------6 1.3 术语解释--------------------------------------------------------------------------------6 1.4 结构原理--------------------------------------------------------------------------------6 2. 伸缩臂架的计算----------------------------------------------------------------------------7 2.1 伸缩臂架的作用载荷及分析---------------------------------------------------------7 2.2 伸缩臂架的临界力的计算------------------------------------------------------------9 2.3 伸缩臂架的刚度校核------------------------------------------------------------------9 2.4 伸缩臂架的强度校核-----------------------------------------------------------------13 2.5 伸缩臂局部稳定性校核--------------------------------------------------------------17 2.6 伸缩臂的整体稳定性校核-----------------------------------------------------------19 3. 回转机构的选型---------------------------------------------------------------------------21 3.1 回转支承的受载情况-----------------------------------------------------------------21 3.2 回转支承选型所需技术参数--------------------------------------------------------21 4. 液压系统的设计计算---------------------------------------------------------------------26 4.1概述---------------------------------------------------------------------------------------26 4.2工作原理---------------------------------------------------------------------------------26 4.3 性能分析--------------------------------------------------------------------------------29 4.4 液压缸主要尺寸的确定--------------------------------------------------------------29 4.5 液压泵的选择--------------------------------------------------------------------------31 4.6 油箱的选择-----------------------------------------------------------------------------32 4.7 管件--------------------------------------------------------------------------------------33 5. 结论与展望---------------------------------------------------------------------------------35 5.1 结论--------------------------------------------------------------------------------------35 5.2 随车起重机的发展趋势--------------------------------------------------------------36 6. 毕业设计总结------------------------------------------------------------------------------38 7. 致谢------------------------------------------------------------------------------------------39 8. 参考文献------------------------------------------------------------------------------------40